[Title] Camera-LiDAR Extrinsic Calibration using Constrained Optimization with Circle Placement
[Journal] IEEE Robotics and Automation Letters (RA-L) Vol. 10, Issue:2, pp. 883-890, 2025.
[Authors] Daeho Kim, Seunghui Shin, and Hyoseok Hwang*
[Motivate] In target-based camera-LiDAR extrinsic calibration, accurate feature extraction is crucial for achieving high performance. However, the discrete nature of LiDAR point clouds can lead to inaccurate feature extraction. This research proposes a method to address this issue by generating a probability distribution from the LiDAR point cloud and utilizing the Lagrangian-multipliers of a known target circle placement to extract more accurate features. This approach is expected to enhance the performance of the calibration process.
[Key Figures]
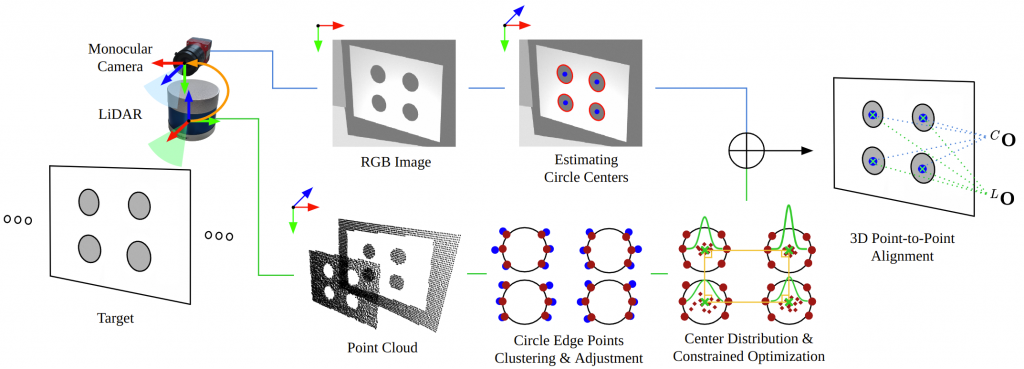
Optimizing the placement of four circle centers with rectangular constraints. (a) LiDAR-scanned circle edge points. (b) Gaussian distribution of adjusted circle edge points, and maximizing probability with rectangular constraints.
Overview of the monocular camera-LiDAR extrinsic calibration framework. A target is positioned within the FOV of the sensors and captured from multiple perspectives. This scenario is an example of a single image and LiDAR scan. After identifying correspondences, the LiDAR to camera extrinsic parameters are determined through 3D point-to-point alignment.
[Key Results]
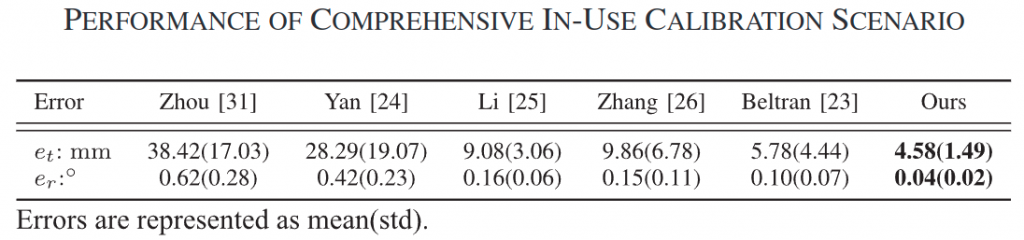
The table above shows the performance evaluation of our proposed method compared with other state-of-the-art (SOTA) camera-LiDAR extrinsic calibration methods, including Beltran, within the last 5 years. The experiment was conducted in a simulated environment with 20 different target poses.The results demonstrate that our method achieves approximately 21% higher accuracy compared to existing methods.
The experiment above compares our method with existing methods in terms of the ability to extract accurate features from discrete LiDAR point clouds. Accuracy was evaluated using LiDAR with 32, 64, and 128 channels respectively, as shown from top to bottom. Our method consistently demonstrates the highest accuracy in all conditions.